















核心优势
-
整机开源设计
全链路技术共享,赋能全球开发者共创迭代
-

超高关节自由度
超高关节12个自由度,灵活应对各种复杂场景
-

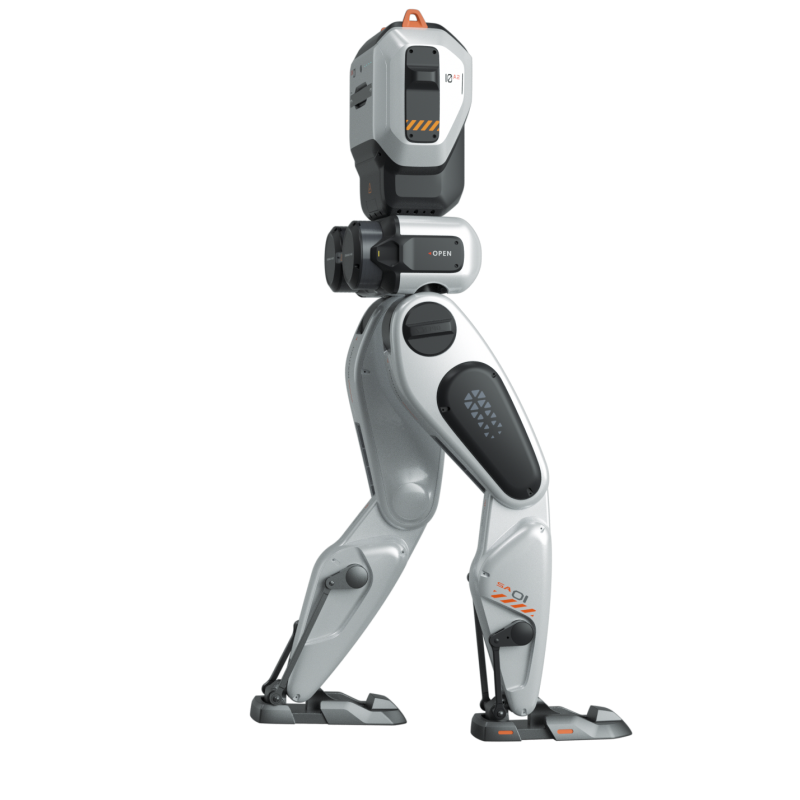
自研直膝步态
摒弃传统机器人屈膝蹒跚的机械步态,自研直膝技术让机器人迈出如人类般自然的步伐
-

全栈自研高性能关节
自研关节实现硬件与软件深度融合,传感器实时捕捉运动数据,算法能迅速响应调整
-

铝合金机身
兼顾抗摔和轻量化设计,强力保护内部硬件安全
-

大容量电池
15Ah(0.819KWh),最大电压 54.6V,可满足长时间连续作业需求
整机开源设计
全链路技术共享,赋能全球开发者共创迭代

用户可以根据需求自定义和改装机械结构,支持添加机械臂等模块
以拓展机器人的功能应用。开放式的设计使科研团队能够深入了解
机器人本体结构,并自由尝试各类硬件改造,实现不同场景中的
二次开发和创新实验。
运动控制算法开源
底层代码透明化,加速算法研发迭代

可获取底层控制代码,根据需要修改或替换算法模块,
将自研的控制策略直接部署于真实机器人进行验证。
开源策略降低了算法实验的门槛,用户能够透过阅读
源码理解双足机器人的控制原理,并快速上手开发
属于自己的运动算法。

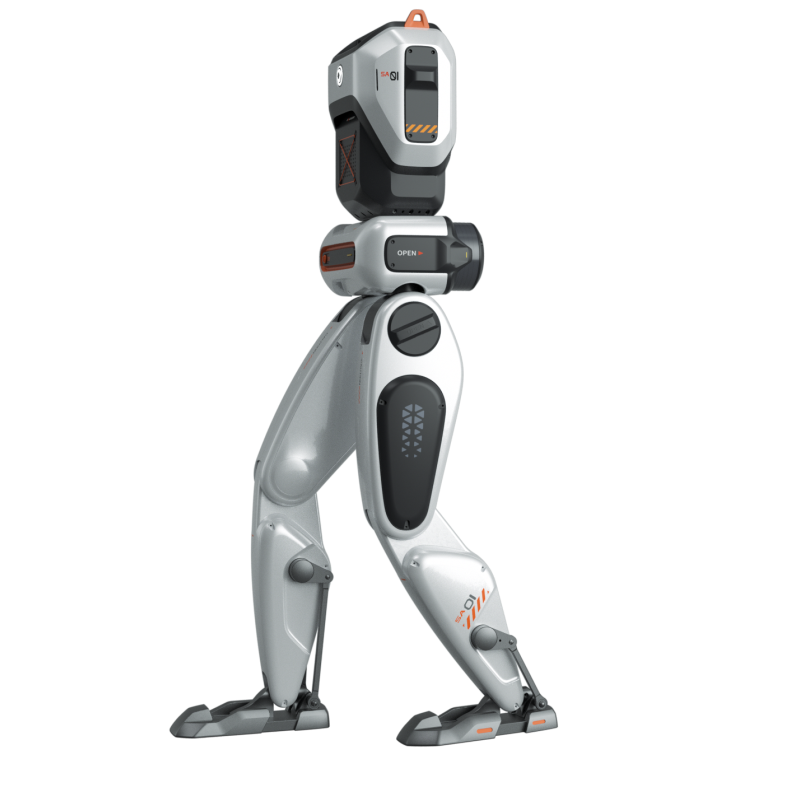
自研直膝步态
SA01配备高性能驱动系统和先进运动控制算法,在动态性能上表现非凡。双足协调六个自由度可实现流畅自研直膝步态,强大的实时平衡控制能力确保机器人在加速、急停或应对外界扰动时依然步履稳健
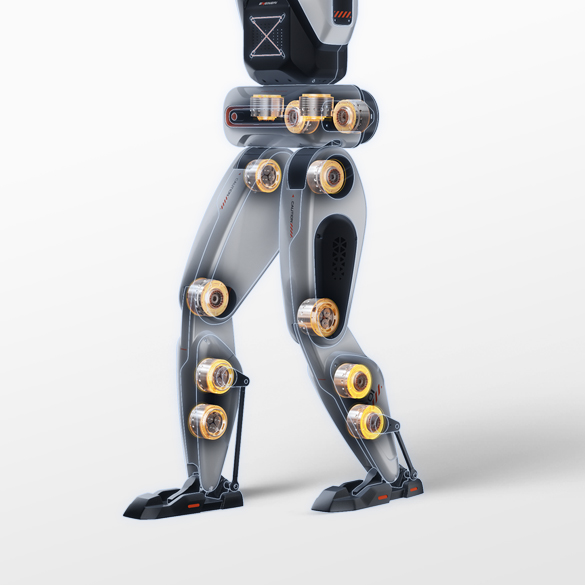
全栈自研高性能关节
SA01搭载全栈自研的一体化关节模组,髋关节与膝关节峰值扭矩高达 160 Nm,强劲动力输出使其在高负载作业时依然游刃有余。创新的关节设计搭载双绝对磁编码器,确保机器人掉电重启后亦能迅速恢复各关节精确位置。每个关节内置完善的安全防护机制
-
双足协同控制
协调双足六自由度,实现平滑、自主研发的直膝步态。
-

实时平衡控制
开放式架构助力学生深入理解机器人控制原理。
全栈自研高性能关节
SA01搭载全栈自研的一体化关节模组,髋关节与膝关节峰值扭矩高达 160 Nm,强劲动力输出使其在高负载作业时依然游刃有余。创新的关节设计搭载双绝对磁编码器,确保机器人掉电重启后亦能迅速恢复各关节精确位置。每个关节内置完善的安全防护机制

1 髋关节与膝关节峰值扭矩高达 160 Nm
2 创新的关节设计搭载双绝对磁编码器
3 每个关节内置完善的安全防护机制

铝合金外骨骼

航空级铝合金材料
SA01 的机身骨架与外壳采用航空级铝合金材料,坚固耐用的同时有效减轻自重。

高强度外壳
精密的铝合金 外骨骼设计提升了整机稳定性。高强度外壳为内部关键部件提供了全面防护,确保机器人在苛刻环境和高强度使用下保持稳定性能。

大容量快拆电池
SA01配备了 15Ah/54.6V 高能量密度锂电池组,支持快速换电设计,可满足长时间连续作业需求。
锂电池组
高能量









































































































核心技术

高性能动力关节全栈自研
配备高精度行星准直驱关节
为算法的部署提供强大的硬件支持
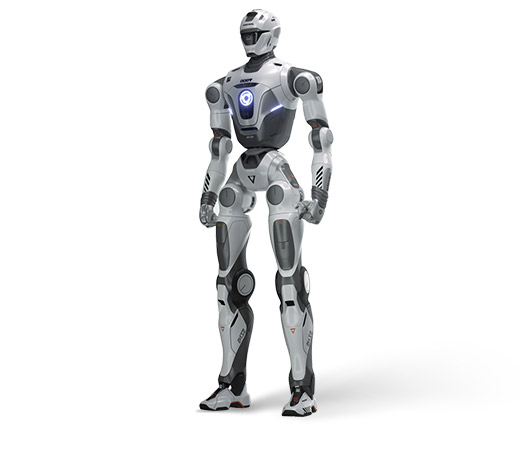
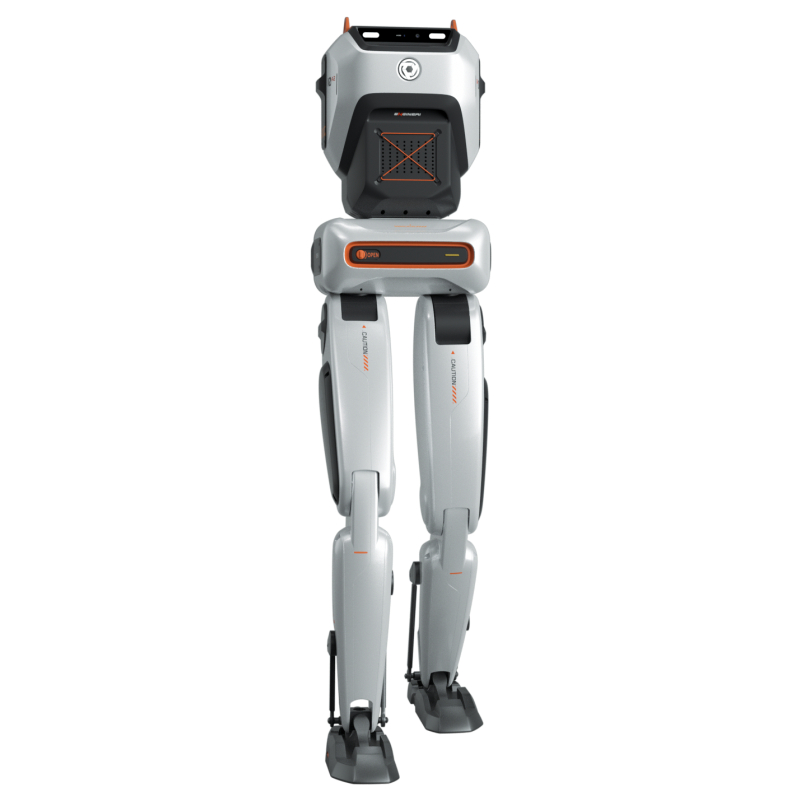
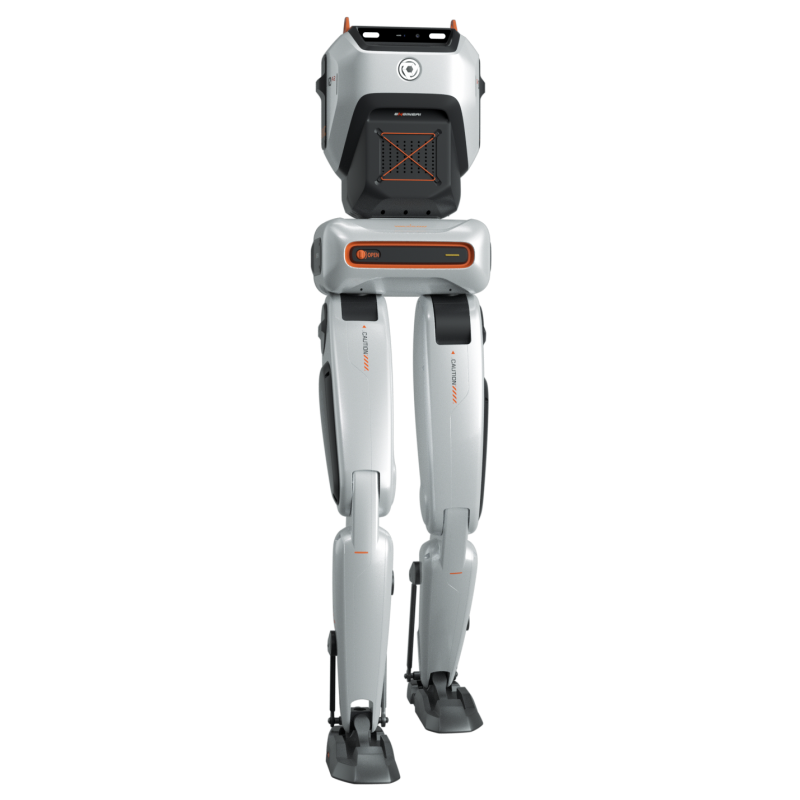
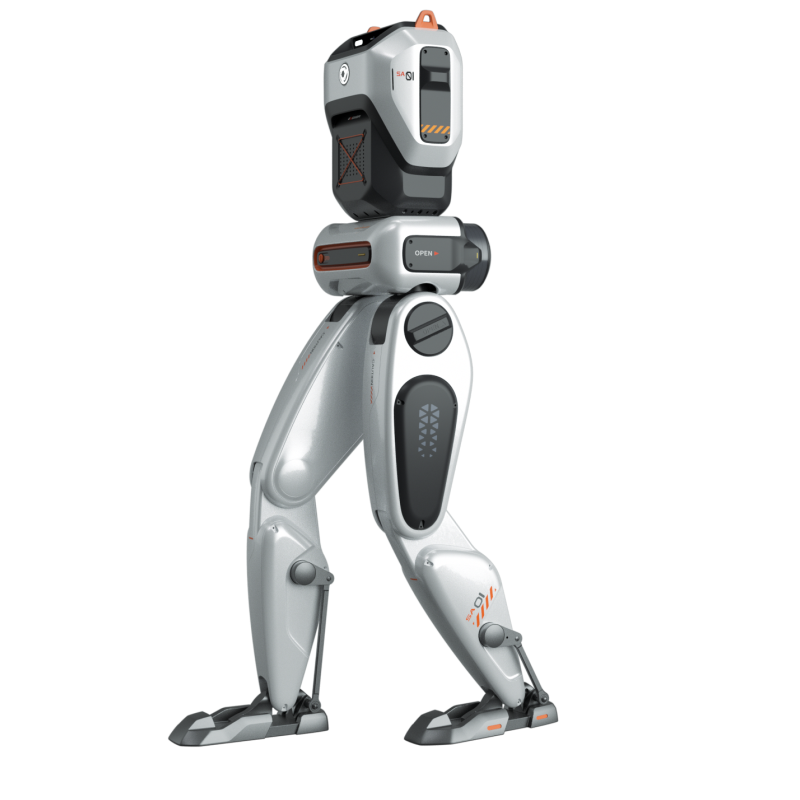
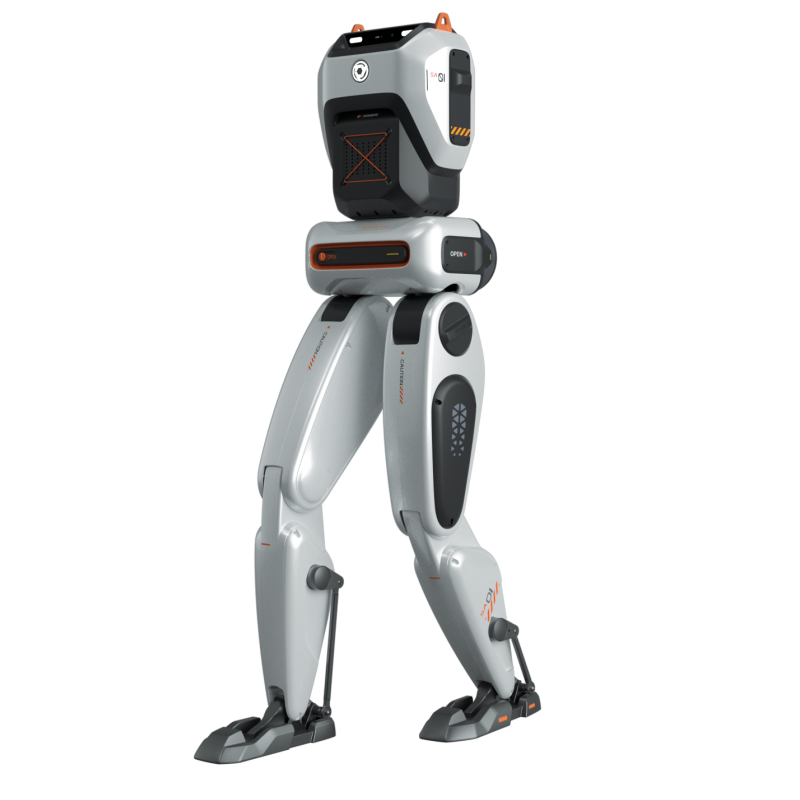
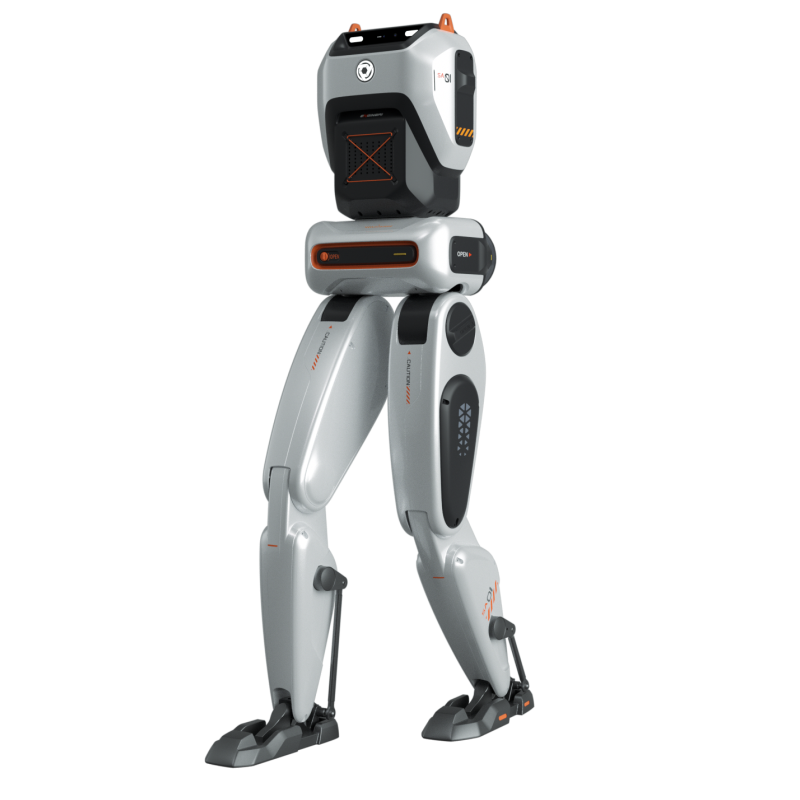
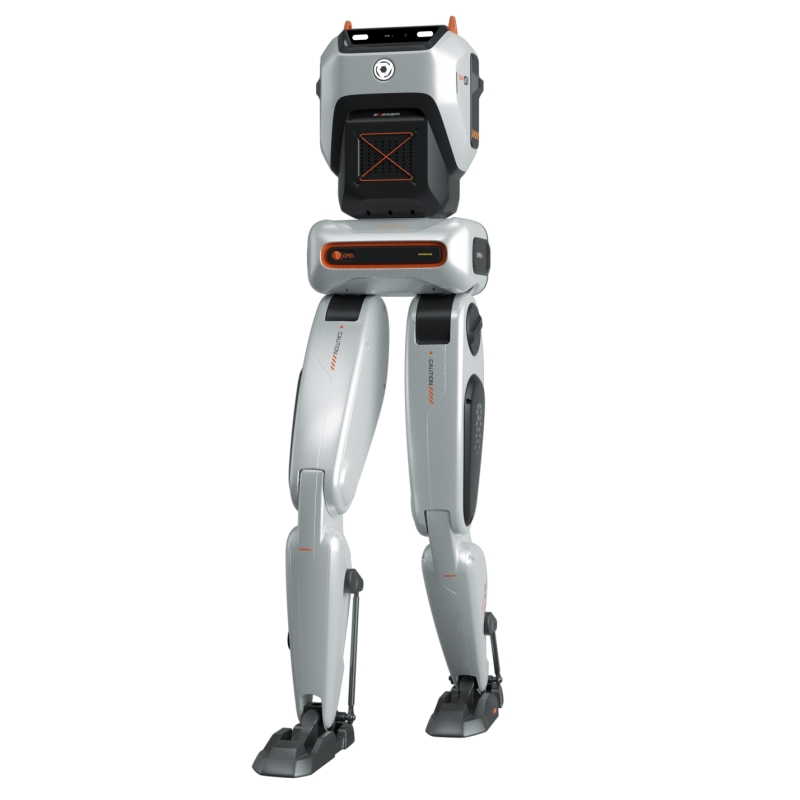
人形直立形态
真正做到市面少有的直腿站立与运动姿态
白黑机身典雅大气,橙色点缀彰显活力
强劲电机,动力充沛
自研S160电机,参数爆表
搭配优秀的运控算法
展现出色的行走和奔跑能力
快拆电池盒
携带15Ah大容量锂电池
连续工作超过两小时
取用方便,充电省心,续航持久
全身12个自由度
内置IMU传感器
平衡性好,稳定性强
通过核心运动模组实现最佳拟人步态
铝合金外骨骼
集成密封与散热
兼顾强度和外观
选材品质和结构设计
皆达到行业领先水平
高性能动力关节全栈自研
配备高精度行星准直驱关节
为算法的部署提供强大的硬件支持
人形直立形态
真正做到市面少有的直腿站立与运动姿态
白黑机身典雅大气,橙色点缀彰显活力
强劲电机,动力充沛
自研S160电机,参数爆表
搭配优秀的运控算法
展现出色的行走和奔跑能力

快拆电池盒
携带15Ah大容量锂电池
连续工作超过两小时
取用方便,充电省心,续航持久
全身12个自由度
内置IMU传感器
平衡性好,稳定性强
通过核心运动模组实现最佳拟人步态
铝合金外骨骼
集成密封与散热
兼顾强度和外观
选材品质和结构设计
皆达到行业领先水平
技术参数
-
尺寸重量
长 × 宽 × 高(站立):
约 1350 mm × 250 mm × 350 mm
大腿 / 小腿长度:
400 mm / 400 mm
整机重量:
约 40 kg
总自由度
12
-
运动参数
移动速度:
约 1 m/s
关节最大扭矩:
160 Nm
单腿自由度:
6
-
电气特性
供电方式:
15Ah(0.819KWh),最大电压 54.6V
工作温度
-20℃ ~ 55℃
续航时间:
约2小时
-
感知系统参数
IMU 惯性单元:
高精度 IMU,用于姿态感知与平衡控制
-
负载能力
负载能力:
约 10–15 kg
